Xzwd | Sina optimum plaga portantes in modern Industrial Robots
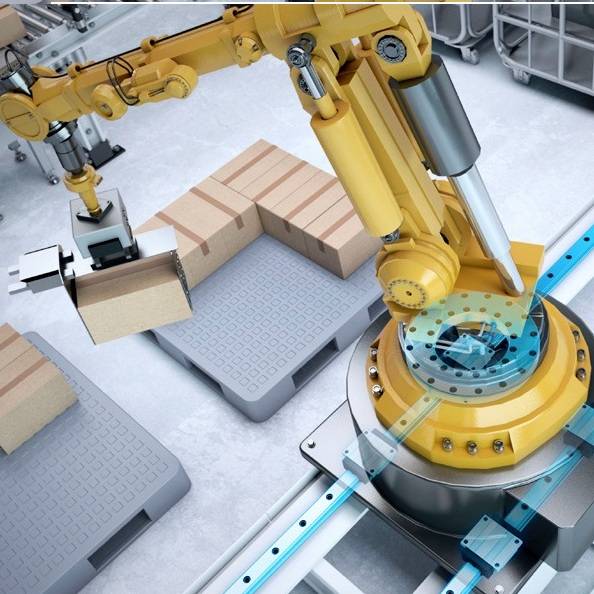



In latos usu industriae robots in automated officinarum habet significantly melius productio efficientiam. Core mechanism of an industriae robot est mechanica brachium. Et multi-gradus-of-libertatem structural consilio concedit in robotic brachium ut maxime alta flexibilitate. Potest verius locate puncta et movere secundum datum trajectoria in spatio. In gyratorius mechanism de mechanica brachium currently utitur a gyratorius hydrau cylindrici vel servo motricium ad animadverto gyratorius actio per aSLANCATUS.

Et plays a vitalis partes in anulum in progressionem industriae robots, ita ut late notum est "iuncturam ex machina". Industrial Robots sunt late in vestibulum officin. Ob eorum accuracy requisita, modern industriae robots sunt communia plaga anulum portantes plerumque uti Crucis cylindro Slewing anulum portantes. XZWD Slewing Ferentem Co., LTD habet exemplar XI series de Suffragio anulum portantes potest occursum huius usus.
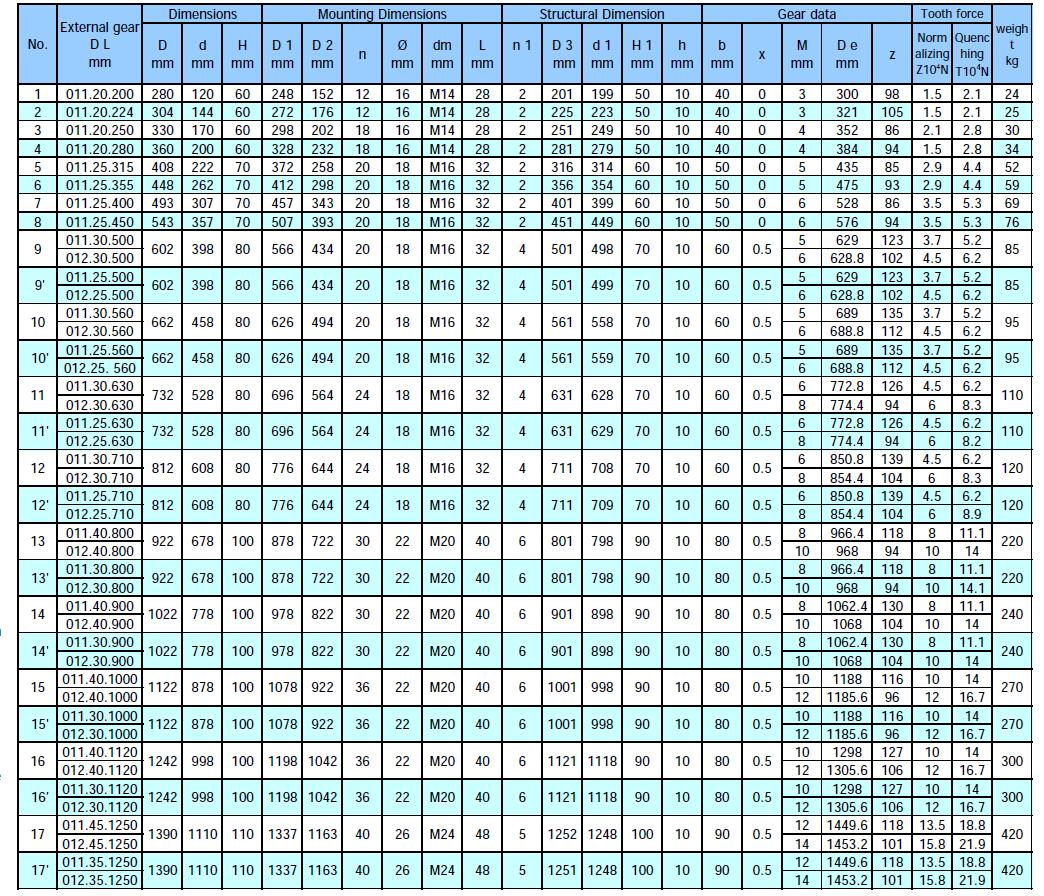
Potes eligere idoneam exemplar ex subjecit anulum specificationem mensam:
Nisi vos have ullus demanda vel volunt ut details, placere sentire liberum contactus nobis
I. Nostrum vestibulum vexillum est secundum Machinery Latin J. / T2300-2011, nos quoque inventa est efficiens species procuratio systems (QMs) de ISO (IX) I: MMXV GB / T19001-2008.
II. Nos devote nos in R & D de customized slewing afferentem cum altum praecisione, speciale rem et requisita.
III. In abundat rudis materiae et princeps productio efficientiam, in turma potest copiam products ad customers quam celerrime fieri potest et breviaverit tempus customers exspectare products.
IV. Internus qualitas continet prima inspectionem, mutua inspectionem, in-processus qualitas imperium et sampling inspectionem ad curare uber qualitas. In comitatu habet completum probatio apparatu et provectus probatio modum.
V. Fortis post-Sales Service Team, opportune solvere mos problems, ut providere customers cum varietate officia.